
21
2022
-
11
关于伺服电机
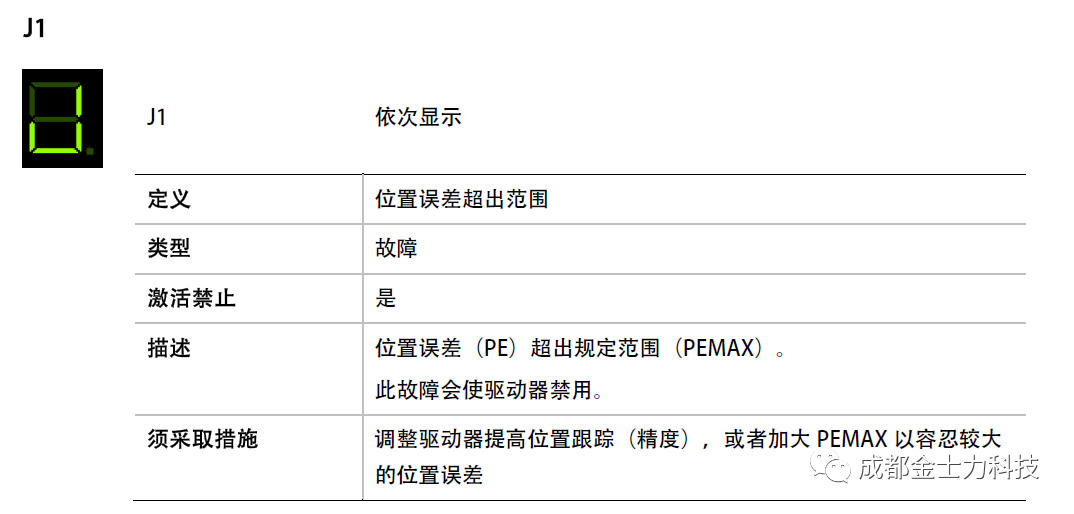
一、高创驱动器内部的加速度设置太低导致J1报警
如果高创驱动器内部的加速度设置太低,而PLC的指令脉冲加速度太高,导致伺服电机指令偏差过大,伺服驱动器出现J1位置误差超限报警。
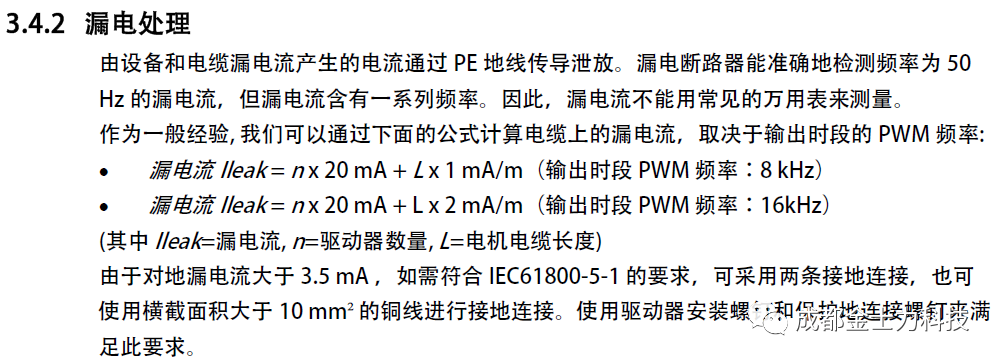
二、高创驱动器和伺服电机漏电导致空开跳闸
解决方法:将驱动器接地端可靠接地
三、第三方伺服驱动器的与西门子PLC的Profinet I/O通讯
1,ABB 的E180、E190系列伺服驱动器,可支持与西门子PLC的Profinet I/O通讯。驱动器标配单轴运动控制功能,以及各种通讯协议:EtherCAT,PowerLINK,Profinet I/O,Modbus TCP,Ethernet IP。
2,只有西门子伺服驱动器的Profinet是全模式(如多轴联动、插补)控制总线,其他第三方伺服驱动器(包括ABB)都是Profinet I/O与西门子PLC通讯,除了不能联动和插补,其他功能都一样。
四、高创伺服驱动器的脉冲方向信号对PLC的输出信号要求
高创驱动器需要PLC的脉冲方向信号是NPN输出
1,台达、松下、三菱等PLC的脉冲方向信号一般是NPN输出,直接使用即可
2,西门子PLC的脉冲方向信号一般是PNP输出,需要用PNP转NPN的信号转换模块。
五、Coley伺服驱动器的脉冲方向信号对PLC的输出信号要求
1,Copley驱动器需要PLC的脉冲、方向信号是PNP输出
2,西门子PLC是PNP的输出, 直接使用即可
3,台达、松下、三菱等日系PLC一般都是NPN输出,需要用信号转换模块。与上图类似,将输出换成“NPN转PNP”
六、KECM的伺服电机的控制精度能达到多少?
1,高创驱动器解析旋变反馈,一圈计数65536,受限于伺服增益调整、机械系统刚性、电机和编码器制造精度等因素影响,电机的实际控制精度优于10弧分
2,17位绝对值编码器单圈精度17位,一圈反馈131072个计数,受限于伺服增益调整、机械系统刚性、电机和编码器制造精度等因素影响,电机的实际控制精度优于10弧分
七、48VDC线圈的伺服电机是否可以用24VDC供电?
1, 用DC/DC电源转换模块将24V转成48V
2, 也可以直接用24V供电,但电机转速只有额定值的50%,只要驱动器的输出电流达到电机的额定电流,电机的输出扭矩不会衰减。
八、伺服电机与驱动器之间最长距离多远?
电机与驱动器之间的距离一般限制在20米。而且不建议线缆中间转接。
1, 如确需更长的距离,需处理好线缆屏蔽,并采用必要的抗干扰措施,如伺服驱动器主电源输入端采用隔离变压器、驱动器接地、动力线缆加磁环等。
2, 线缆如确需中间转接,需要处理好反馈线缆的屏蔽层,防止电磁干扰。
伺服电机
关注我们

微信公众号
这里是占位文字
成都金士力科技有限公司
华东地区:18224448086王先生(微信同号)
华北地区:13880663726罗先生(微信同号)
华南地区:18982051022杨先生(微信同号)
其他地区:18224448086王先生(微信同号)
企业邮箱:info@kingsni.com
公司地址:中国(四川)自由贸易区成都市双流区物联三路588号
Copyright © 2022 成都金士力科技有限公司
技术支持:中企动力成都 | SEO标签